



 B
BAbout this program
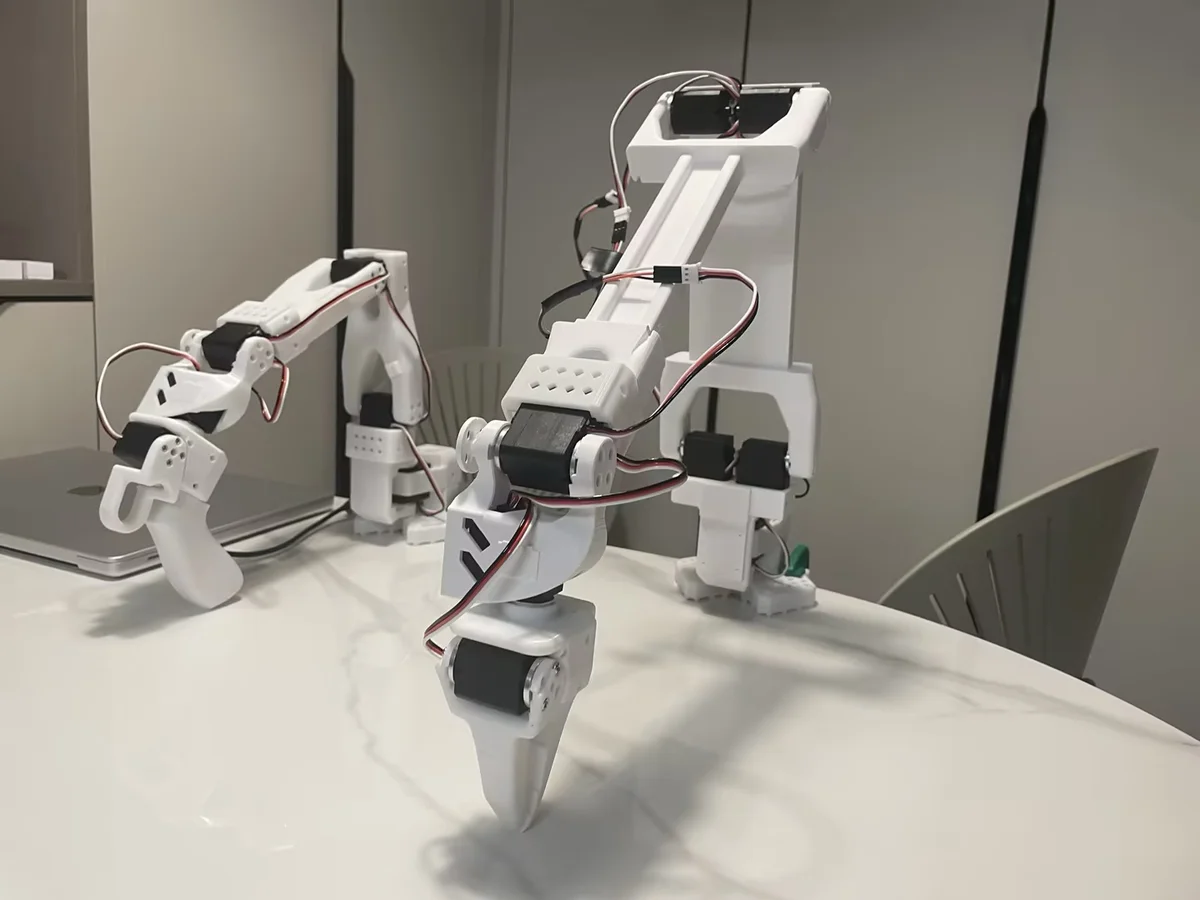
PingTi Arm is an open-source, human-scale robotic arm built for affordability and compatibility with the SO-ARM100 ecosystem. Its name comes from the Chinese "平替" (píng tì), meaning "affordable substitute" — the arm delivers human arm proportions at a fraction of typical robot arm costs.
Designed to be fully compatible with Hugging Face's LeRobot framework, PingTi Arm supports teleoperation, imitation learning data collection, and policy deployment out of the box via the pingti_lerobot_bridge SDK.
Key specs:
- Reach: 600mm arm span (excluding end effector)
- Payload: Up to 500g at full extension
- Joints: 6 DOF: base yaw, dual-motor shoulder pitch, elbow pitch, wrist pitch, wrist roll + gripper
- Servos: STS3215 Feetech serial bus smart servos (same family as SO-ARM100)
- Build cost: ~$261 single arm | ~$390 leader-follower pair
- SO-100 upgrade path: If you already own an SO-100 arm (12V, 30kg.cm variant), you only need 2 additional servos + a USB drive board (~$157) to assemble PingTi
- Simulation: Full URDF and collision meshes included for MuJoCo/Isaac Sim
Why human-scale? Most low-cost robot arms (SO-100, Koch v1) are tabletop-scale. PingTi Arm's 600mm span covers real desktop-manipulation tasks — grasping objects at the edge of a table, pouring, stacking — that shorter arms can't reach without repositioning.
LeRobot integration: Connect PingTi Arm as a follower in a leader-follower teleoperation setup using SO-100 as leader. Record demonstrations, train ACT or Diffusion Policy, and deploy. The pingti_lerobot_bridge repo provides all the calibration and control scripts.
Hardware and software licensed under Apache 2.0. Original design by nomorewzx — https://github.com/nomorewzx/PingTi-Arm
🖨 Print Files (26)
base_yaw_link.stl
base_link_from_so100.stl
elbow_link.stl
moving_gripper_1.stl
shoulder_link_1.stl
moving_gripper_from_so100.stl
Required Hardware
| Qty | Part | Est. Unit Cost | Notes |
|---|---|---|---|
| 7 | STS3215 Feetech Serial Bus Servo (7.4V, 20kg.cm) | ~$14–18 | Base yaw (×1), shoulder pitch (×2), elbow (×1), wrist pitch (×1), wrist roll (×1), gripper (×1) |
| 1 | Waveshare Serial Bus Servo Driver Board | ~$16–20 | USB serial control board for STS3215 bus |
| 1 | 12V DC Power Supply (5A, 5.5×2.1mm) | ~$10–12 | Powers servos; 12V required for 30kg.cm variant |
| 1 | USB-C Cable (2-pack) | ~$7 | Connects control board to host PC |
| 1 | M3 Screw Assortment Kit | ~$10 | M3×8, M3×12, M3×16 cap-head for arm assembly |
| 1 | 3D-Printed Links | — | Print from provided STL/3MF files; ~600g filament |
Estimated total: ~$150–200 (single arm, excluding filament and tools). A leader-follower pair using SO-100 as leader is ~$390.