

Legolas Biped
 B
B✓ Confirmed fresh May 13, 2026
Sign up to InstallAbout this program
45 stars on GitHub.
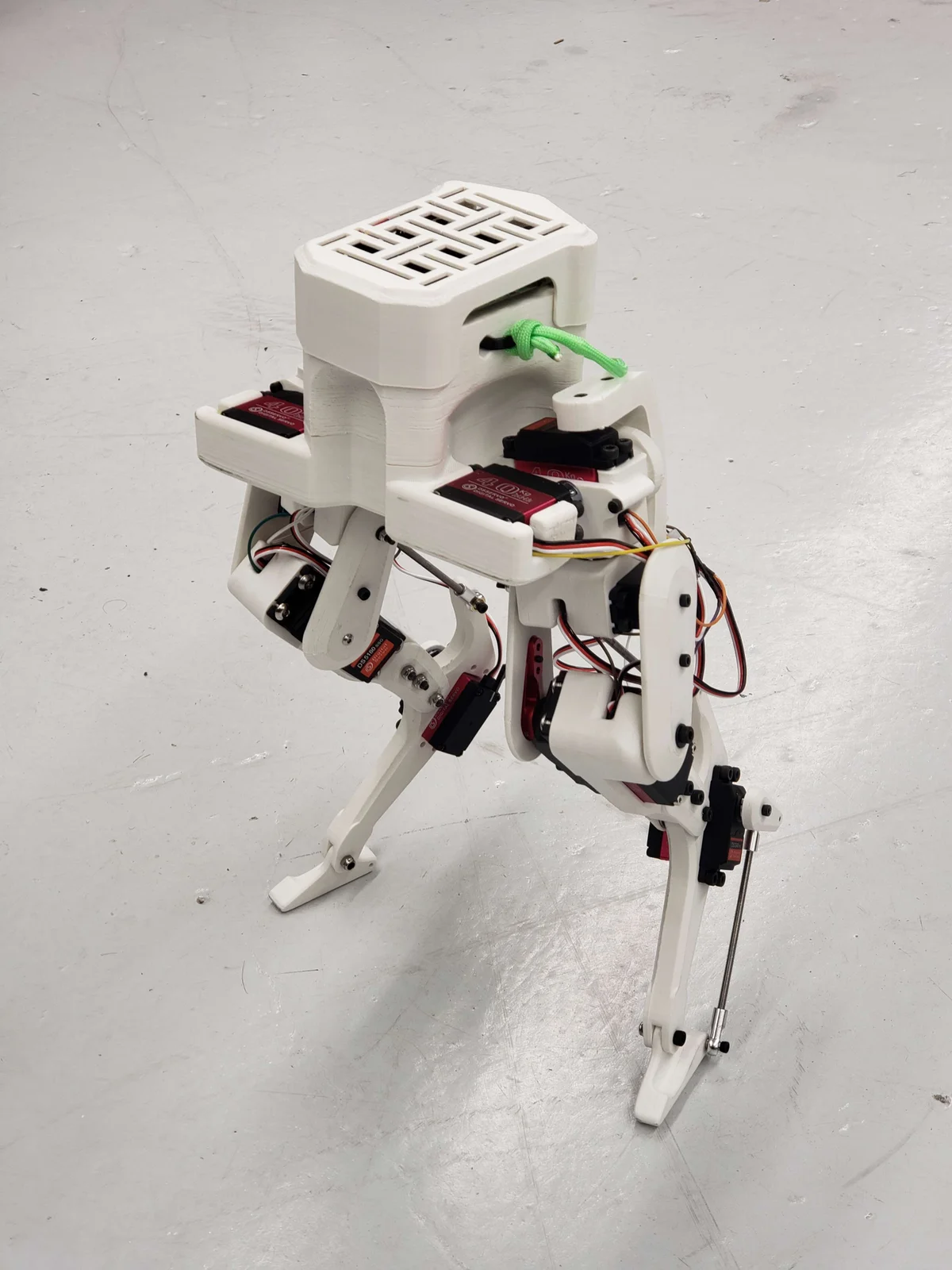
Legolas is an open-source mini bipedal robot designed by David Ho, a master's student at the University of Michigan. Inspired by the Cassie bipedal robot from Agility Robotics, Legolas reproduces the same inverted-leg "cassowary" geometry at a fraction of the cost using hobby servos and 3D-printed parts.
Source: https://github.com/daviddoo02/Legolas-an-open-source-biped
The robot stands roughly one foot tall and walks using 10 hobby servo motors: eight 40 kg-cm servos and two 80 kg-cm servos, coordinated through a PCA9685 16-channel PWM servo driver board. An MPU6050 inertial measurement unit provides balance feedback, and a Raspberry Pi 4 handles all control computation. The design deliberately omits an onboard battery — the robot runs tethered for continuous testing without power interruptions.
All structural components are 3D-printable in standard PLA/PETG with roughly 1 kg of filament. The 20-part printable set covers the complete lower body: foot, shoe variants (A/B), shin, thigh (inner and outer), foreleg (A/B/C), hip joints (1A/1B, 2, pitch A/B), main body, body cover, wire connector container, ADC mount, servo cover, and a test bench adaptor for development work.
CAD source files are provided in SolidWorks format. A MuJoCo simulation model is included for reinforcement learning experiments before deploying to hardware.
License: MIT.
🖨 Print Files (58)
Foot.STL
Foreleg A.STL
Foreleg B.STL
Foreleg C.STL
Hip 1 A.STL
Hip 1 B.STL
Required Hardware
| Part | Qty | Notes |
|---|---|---|
| Raspberry Pi 4 | 1 | Primary controller |
| 40 kg servo | 8 | Main leg joints |
| 80 kg servo | 2 | High-torque hip joints |
| PCA9685 Servo Driver | 1 | PWM control board |
| MPU6050 IMU | 1 | Motion/balance sensor |
| ADS1115 ADC | 1 | Analog converter |
| PLA/PETG Filament | ~1 kg | Structural parts |
| Thrust bearings | multiple | Joint assembly |
| Ball joint rod ends | multiple | Linkage assembly |