





 B
BAbout this program
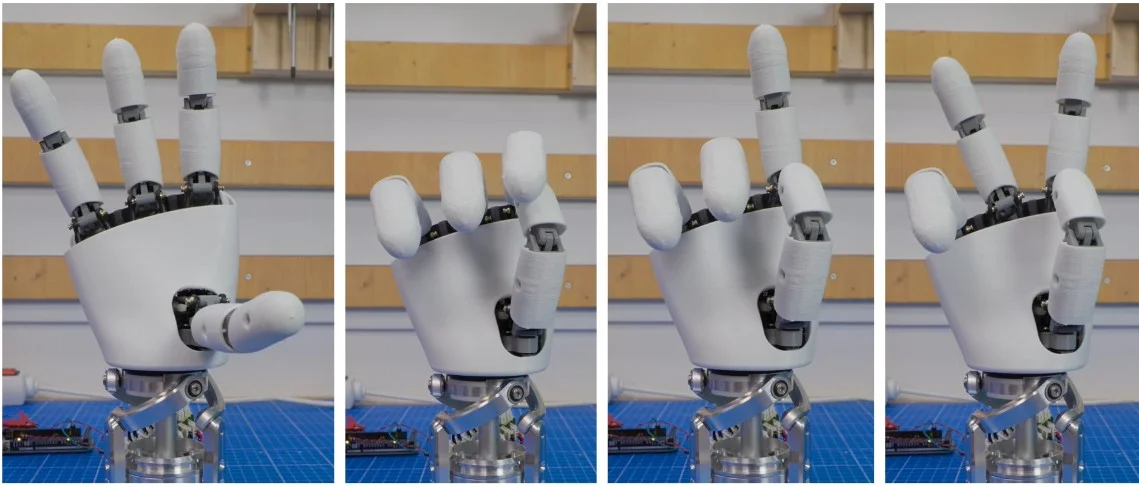
Amazing Hand is an open-source 8-DOF humanoid hand that packs all its actuators inside the palm — no cables, no deported motors, no forearm clutter. Derived from Pollen Robotics' expertise on Reachy 2, it brings professional-quality dexterity at under 200€.
Four fingers, each with two degrees of freedom (flexion/extension and abduction/adduction), are driven by parallel mechanisms using pairs of Feetech SCS0009 micro servos. The result is a surprisingly expressive hand that can grasp, pinch, point, spread, and form complex gestures.
Key specs:
- DOF: 8 (2 per finger × 4 fingers — index, middle, ring, pinky)
- Mechanism: Parallel mechanism per finger — both joints driven simultaneously by 2 servos
- Servos: 8× Feetech SCS0009 (serial bus, compact)
- Weight: ~400g assembled
- Build cost: Under 200€ (including servos)
- Wrist interface: Designed for Reachy 2's Orbita 3D wrist, adaptable to other platforms
- SO-ARM100 interface: Adapter STL included for mounting on SO-ARM100
Design philosophy: The parallel mechanism is the key innovation: two servos actuate each finger through a gimbal linkage, decoupling flexion/extension from side-to-side movement without requiring tendons or cables. All 8 actuators are housed within the palm housing, keeping the wrist clean and the arm kinematics unaffected.
Control: Two modes: Python serial bus (using a Waveshare SC driver board) or Arduino + Feetech TTL Linker. Both methods and demo code are included in the repository.
An "Amazing Hand Enhanced" branch extends this design with additional capabilities — see the repo for the latest.
Code licensed under Apache 2.0. Mechanical design licensed under CC BY 4.0. Original design by Pollen Robotics — https://github.com/pollen-robotics/AmazingHand
🖨 Print Files (100)
Amazing Hand Parts - Distal.stl
Amazing Hand Parts - Link.stl
Amazing Hand Parts - Finger_Frame-2.stl
Amazing Hand Parts - Gimbal.stl
Amazing Hand Parts - Finger_Frame-1.stl
BallJoint_Rod - Length_Toolings.stl
Required Hardware
Amazing Hand — Bill of Materials
Open-source 8-DOF humanoid hand by Pollen Robotics. Total build cost ~$149 USD (Waveshare control option, excluding filament). Source: official Google Sheets BOM.
Prices converted from EUR at ~1.16 USD/EUR (per upstream sheet).
Servos & Mechanical Hardware
| Item | Qty | Unit (USD) | Notes |
|---|---|---|---|
| Feetech SCS0009 serial bus servo | 8 | $8.30 | Primary actuator — 2 per finger. Source: Alibaba |
| Ball joint M2 L19 (rod-end, ball joint) | 16 | $1.28 | Linkage joints |
| M2 threaded rod L300mm | 1 | $1.98 | Cut to length |
| Axis D2 × 10mm (steel pivot pin) | 8 | $0.58 | Pivot pins |
| Axis D2 × 16mm (steel pivot pin) | 8 | $0.93 | Pivot pins |
| Bushing GFM 0608-04 (6mm ID / 8mm OD) | 8 | $1.86 | Joint bushings |
| Thermoplastic screw 2.5 × 6mm | 16 | $0.01 | Self-tapping |
| Thermoplastic screw 2.5 × 8mm | 30 | $0.01 | Self-tapping |
| Washer M2.5 (8mm OD, large series) | 4 | $0.50 | Spacing |