



 B
BAbout this program
2,794 stars on GitHub.
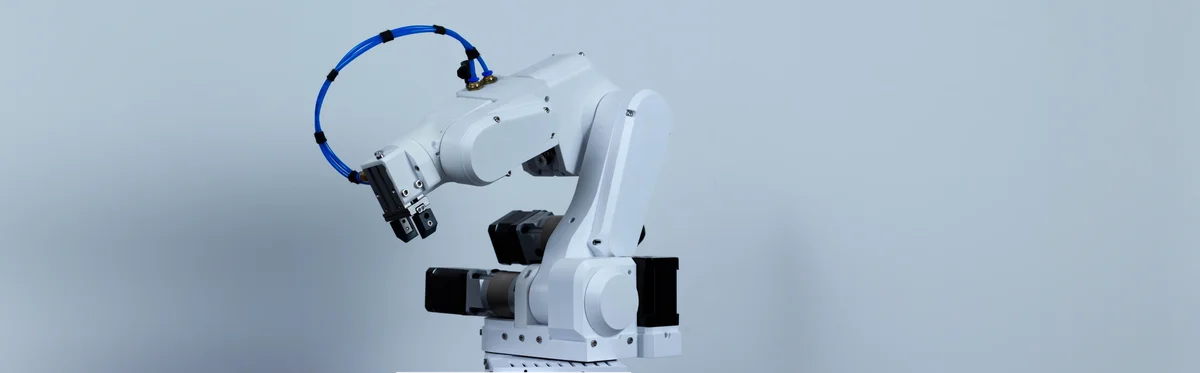
The PAROL6 is a high-performance 6-DOF desktop robotic arm designed by Petar Crnjak (Source Robotics) under GPLv3. Its mechanical and control approach mirrors industrial-class arms — closed-loop stepper drives, limit switches on every joint, and an E-stop module — but at a desktop footprint and DIY cost. Source: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm
The repo ships the full STL set organized by joint module (BASE, SHOULDER, UPPER_ARM, ELBOW, FOREARM, WRIST, plus interchangeable gripper attachments — pneumatic, vacuum, mechanical), a complete BOM PDF, step-by-step building instructions, and the PAROL Commander control software. A ROS 2 / MoveIt simulation package and a Python API are maintained alongside.
Specs at a glance:
- 6 degrees of freedom
- ~400mm reach (desktop class)
- Closed-loop stepper drives on every joint with limit switches
- Custom control board (PAROL6) running open firmware
- Optional grippers: parallel mechanical, pneumatic, vacuum
Build resources:
- BOM: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm/tree/main/BOM
- Building instructions: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm/tree/main/Building%20instructions
- Docs site: https://source-robotics.github.io/PAROL-docs/
- Commander software: https://github.com/PCrnjak/PAROL-commander-software
- ROS 2 / MoveIt: https://github.com/PCrnjak/PAROL6-ROS2-MOVEIT
- Hackaday project page: https://hackaday.io/project/191860-parol6-desktop-robotic-arm
- Discord: http://discord.gg/prjUvjmGpZ
License: GPLv3. The PAROL6 is sold preassembled by Source Robotics, but the full design is open for self-sourcing and building.
🖨 Print Files (13)
Electronics_case_v1_1.STL
lid_electronics.STL
J1_backplate.STL
J1_rotation_shaft.STL
J1_turret_motor_holder.STL
J2_stopper_block.STL
PAROL6 Desktop Arm — Bill of Materials
Authoritative BOM mirrored from the upstream PAROL6 repository (revision dated 4 Apr 2026): https://github.com/PCrnjak/PAROL6-Desktop-robot-arm/tree/main/BOM
The PAROL6 is a 6-DOF desktop robot arm by Petar Crnjak (Source Robotics), GPLv3. The build pairs Nema-17 steppers with planetary gearboxes and a custom PAROL control board. Screws, belts, and bearings can also be sourced locally — quantities below are upstream's recommended minimums.
Estimated total self-source cost (excluding 3D printing filament): roughly $900–$1,400 USD. The PAROL control board + 6× TMC5160 drivers + the precision planetary gearboxes are the dominant line items. Buying the kit preassembled from Source Robotics is significantly more.
Motors (Nema 17 steppers)
| Part | Qty | Description |
|---|---|---|
| Stepper 1 (Nema 17) | 1 | 16 N·cm, 42×42×20 mm |
| Stepper 2 (Nema 17) | 3 | 45 N·cm, 42×42×40 mm |
| Stepper 3 (Nema 17) | 2 | 65 N·cm, 42×42×60 mm |
Gearboxes
| Part | Qty | Description |
|---|