




 B
BAbout this program
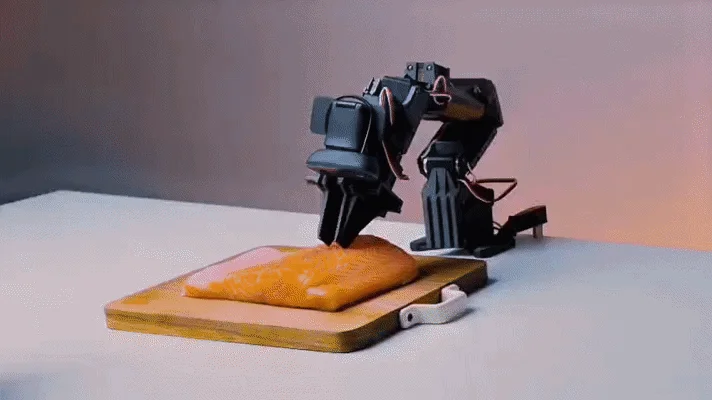
ElRobot is a fully 3D-printable 7+1 DOF robotic arm designed by the NormaCore team for affordable physical-AI research and imitation learning experiments.
With 6 main joints plus a parallel jaw gripper as the 7th degree of freedom, ElRobot covers a wide workspace while remaining lightweight and low-cost — the full build runs around $220 in hardware including 7 STS3215 serial bus smart servos, which are the same servo family used in leading open-source arms like SO-ARM100.
The arm ships with full URDF + mesh support for simulation (NVIDIA Isaac Sim, MuJoCo, ROS 2), making it dual-purpose: train imitation learning policies in simulation and deploy directly to the physical hardware without modification.
Key specs:
- Joints: 6 rotational (shoulder pan/tilt, elbow, wrist pitch/yaw/roll) + parallel jaw gripper
- Servos: 7× Feetech STS3215 serial bus servos (TTL half-duplex, 12V)
- Print time: ~14 hours total across all structural parts
- Filament: PLA+ recommended; PETG for high-cycle gripper jaws
- Payload: ~200g at full extension
- Build cost: ~$220 USD (servos + hardware kit; printer not included)
- Simulation: URDF meshes provided in
hardware/elrobot/simulation/
Imitation learning workflow: NormaCore provides a full teleoperation stack based on LeRobot. A leader arm (or SpaceMouse) records demonstrations which are replayed and used to train ACT / Diffusion Policy models. The simulation assets in this repo mean you can augment real demonstrations with synthetic rollouts for data-efficient policy learning.
Build this robot: Full BOM, assembly guide, and wiring diagrams are in the NormaCore GitHub repository. STL files for all structural components are embedded in this program for 3D printing reference.
Hardware licensed under MIT. Software stack licensed under MIT. Original design by the NormaCore team — https://github.com/norma-core/norma-core
Build Guide
Assembly manuals (PDF) and hardware files: github.com/norma-core/norma-core/blob/main/hardware/elrobot/README.md
🖨 Print Files (39)
Gripper_Gear_v1_1.stl
base_link.stl
Gripper_Jaw_01_v1_1.stl
Gripper_Jaw_02_v1_1.stl
Joint_03_v1_1.stl
Joint_01_1.stl
Required Hardware
| Qty | Part | Notes |
|---|---|---|
| 7 | Feetech STS3215 Serial Bus Servo | Main actuators (12V, 30kg·cm) |
| 1 | Waveshare Serial Bus Servo Driver Board | USB-to-TTL half-duplex bridge |
| 1 | Seeed XIAO ESP32C3 | Controller (USB-C) |
| 1 | 12V 4A DC Power Supply | Servo power |
| 1 | 5V 3A DC Power Supply | Logic/controller power |
| 1 | Powered Active USB 3.0 Hub | Camera + hub power |
| 1 | USB Camera (Innomaker 1080P) | Wrist/arm vision |
| 1 | USB-C Data Cable | Controller connection |
| 2 | Heavy Duty Table Clamp | Arm mounting |
| 1 | 3D printed frame | See STL files |
| 1 | M3/M4 screw assortment | Assembly |