 B
BAbout this program
90 stars on GitHub.
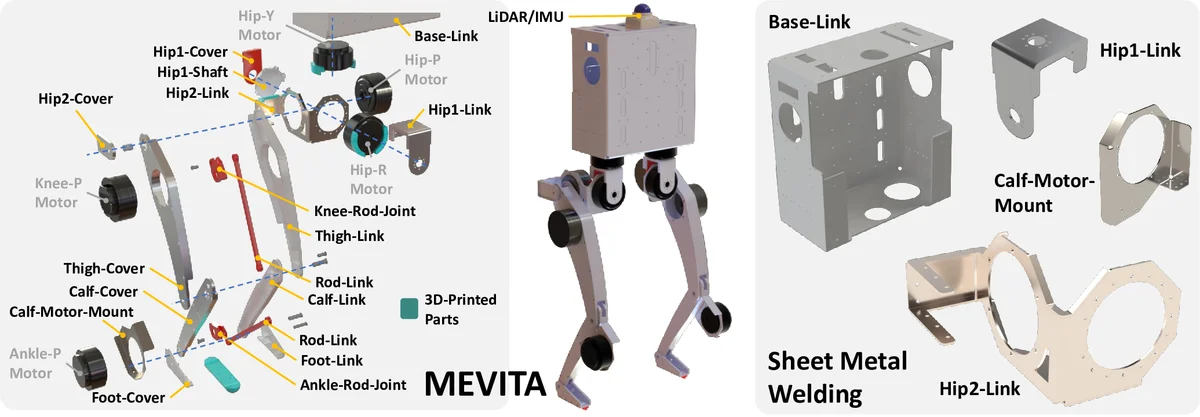
MEVITA is an open-source bipedal robot designed to be assembled entirely from e-commerce components — sheet metal parts, machined elements, and off-the-shelf actuators — without access to specialized manufacturing. A sister project to MEVIUS (quadruped), MEVITA extends the approach to two-legged locomotion research. Published at IEEE conference proceedings with accompanying arXiv paper.
Source: https://github.com/haraduka/mevita
The robot has 10 degrees of freedom across two legs (5 DOF per leg: hip yaw, hip roll, hip pitch, knee pitch, ankle pitch), driven by CubeMars AK70-10 and AK10-9 V2.0 brushless actuators. All meshes are provided for full 3D-printable structural parts. A Livox LiDAR provides depth sensing for environment mapping.
MEVITA runs ROS1 with reinforcement learning policies trained in Isaac Gym (legged_gym framework). The two-phase training pipeline first learns stable walking, then fine-tunes with varied friction and command distributions. Motor control uses CAN bus via RUBIK LINK V2.0 adapter.
Hardware: 10× CubeMars AK70-10/AK10-9 brushless actuators, RUBIK LINK V2.0 CAN interface, Livox LiDAR, Intel RealSense T265. Open source under MIT license.
Install Notes
MEVITA has the same hardware requirements as MEVIUS. It requires a CAN bus interface (e.g., PEAK PCAN-USB) connected to the Pi before launch will work — call can_setup first to initialize it. The actuators are quasi-direct-drive motors, not hobby servos. See the MEVITA hardware guide for compatible actuator specifications.
🖨 Print Files (13)
L_hip1_link.STL
base_link.STL
L_foot_long_link.STL
L_foot_link.STL
R_foot_long_link.STL
R_foot_link.STL
Required Hardware
| Item | Qty | Unit Cost (USD) | Total (USD) | Notes |
|---|---|---|---|---|
| CubeMars AK70-10 KV100 quasi-direct-drive actuator (24.8 N·m peak, 10:1) | 6 | $399 | $2,394 | Hip & knee joints (joints L1–L3 / R1–R3) — CubeMars store |
| CubeMars AK10-9 V2.0 KV60 quasi-direct-drive actuator (48 N·m peak, 9:1) | 4 | $499 | $1,996 | Heavier joints (L4–L5 / R4–R5) — CubeMars page |
| RUBIK LINK V2.0 USB-CAN multi-channel adapter | 1 | $200 | $200 | Required by repo's launch files for CAN bus comms |
| Livox Mid-360 LiDAR (or Livox Mid-70) | 1 | $850 | $850 | Referenced in repo launch files — Livox shop |
| Mini-PC / Intel NUC i5+ class running Ubuntu | 1 | $400 | $400 | Realtime control host — Amazon search |
| 6S 5000 mAh LiPo battery (22.2V) | 2 | $80 | $160 | One pack + spare — Amazon search |
| 24V → 5V/12V step-down DC-DC buck converter (10A) | 2 | $20 | $40 | Amazon search |
| BNO055 IMU module | 1 | $25 | $25 | Body orientation — Amazon search |
| FSR pressure / contact sensor | 4 | $10 | $40 | Foot ground-contact detection — Amazon search |
| PS4 (DualShock 4) controller + USB Bluetooth dongle | 1 | $60 | $60 | Teleop input (ds4drv) — Amazon search |
| Sheet metal — 1.5–2 mm steel/aluminum stock (cut to drawings) | 1 | $80 | $80 | Frame material; shop welding — Amazon search |
| MIG welding wire / TIG filler rod (matching alloy) | 1 | $30 | $30 | For sheet-metal welding — Amazon search |
| 14 AWG silicone hookup wire (red/black, 25 ft each) | 1 | $25 | $25 | High-current motor power — Amazon search |
| XT60 / XT90 connector pairs | 8 | $2 | $16 | Amazon search |
| CAN-bus DB9 cable + 120Ω terminator | 2 | $10 | $20 | Amazon search |
| M3 / M4 / M5 / M6 socket-head screw assortment (stainless) | 1 | $40 | $40 | Joint mounts — Amazon search |
| Heat-set threaded inserts M4 + M5 (200-pack) | 1 | $20 | $20 | Amazon search |
| E-stop button (panel-mount, NC) | 1 | $15 | $15 | Safety — Amazon search |