



 B
BAbout this program
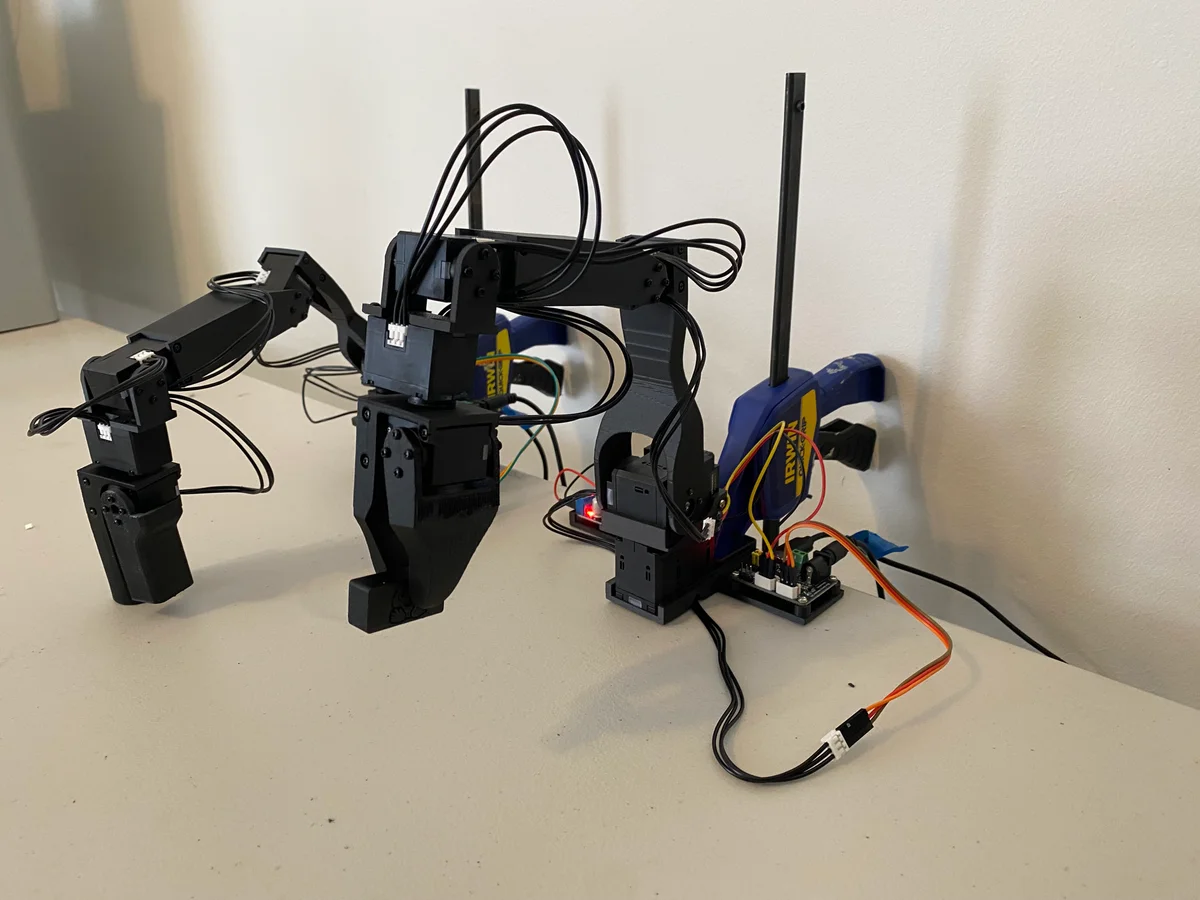
Koch v1.1 is a low-cost, open-source 6-DOF 3D-printed robot arm pair engineered for imitation-learning research. A lightweight leader arm acts as the human interface; a stronger follower arm replicates the motion in the real world. Both limbs are printed from PLA/PLA+ on a consumer FDM printer, snap together without special tooling, and are driven by Dynamixel XL-series servos (XL430 for high-torque joints, XL330 for the wrist). A single Waveshare USB-C servo bus board streams commands from any laptop or SBC, so the whole rig can be built and controlled for ≈ $600 in parts. The project ships with out of the box with HuggingFace’s LeRobot framework: record kinesthetic demonstrations, store them in a public dataset, and train vision-based policies with a few CLI commands. Because trajectories are saved in the standard LeRobot format, they can be shared on the HuggingFace Hub and re-used by the community—turning every build into a potential data contribution. Creator Jess Moss publishes the CAD, BOM, and firmware under the permissive MIT license, encouraging remixing and redistribution. The design is intentionally modular: joints are identical mirrored segments, servo horns are printable, and the gripper can be swapped for a low-cost vacuum cup or a custom end-effector. If you want an entry point into real-world imitation learning that you can build in a weekend and expand indefinitely, Koch v1.1 is it.
🖨 Print Files (15)
Follower_Base.STL
Follower_Shoulder_Rotation.STL
Follower_Shoulder_To_Elbow.STL
Follower_Elbow_To_Wrist.STL
Follower_Elbow_To_Wrist_Extension.STL
Follower_Gripper_Static_Part.STL
Required Hardware
| Part | Qty | Source/Notes |
|---|---|---|
| Dynamixel XL330-M077-T | 6 | Robotis US store |
| XL330 Frame & Idler Wheel 4pcs set | 1 | Robotis US store (only 3 idler wheels used) |
| Waveshare Serial Bus Servo Driver Board | 1 | Amazon / Waveshare store |
| 5V Power Supply | 1 | Amazon 5V 4A adapter |
| Jumper Wires 3×40 pcs set | 1 | Amazon male-female kit |
| Table Clamp | 1 | Amazon lab clamp |
| 1.5mm Star/Cruciform Screwdriver 2pcs | 1 | Amazon precision set |
| USB C-A or C-C 2pcs set | 1 | Amazon 2-pack |
| Dynamixel XL430-W250-T | 2 | Robotis US store |
| Dynamixel XL330-M288-T | 4 | Robotis US store |
| XL430 Idler Wheel set | 1 | Robotis US store |
| Voltage Reducer | 1 | Amazon 12V→5V buck module |
| 12V Power Supply | 1 | Amazon 12V 5A adapter |