




 B
BAbout this program
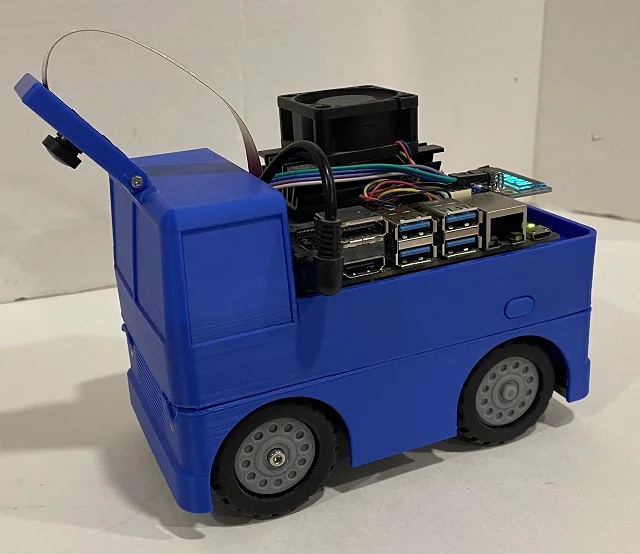
JetCar — Mini Self-Driving Car (Jetson Nano)
JetCar is an autonomous mini-car powered by an NVIDIA Jetson Nano Developer Kit, inspired by NVIDIA's JetBot and JetRacer. It learns to navigate printed street maps using deep learning image segmentation, recognizing intersections, lane markings, and turn arrows, then steering through them in response to user-requested directions.
What it does
- Captures camera frames at runtime on the Jetson Nano
- Runs a U-Net-style segmentation model (trained in Google Colab) to mask lanes, intersections, and arrows
- Plans steering and throttle from the predicted mask
- Drives a 2-motor + 1-servo Ackermann-style chassis with headlights/brake lights/blinkers
Hardware highlights
- Compute: NVIDIA Jetson Nano Developer Kit (required — GPU is used for inference)
- Drivetrain: 2 × geared DC motors (6V, 10–30 RPM) + DRV8833-style H-bridge
- Steering: 1 × 9g metal-gear servo + 3D-printed Ackermann linkage
- Servo control: PCA9685 16-channel PWM driver
- Camera: IMX219 MIPI-CSI (Leopard LI-IMX219-MIPI-FF-NANO-H145)
- Display: PiOLED status display
- Power: 10,000 mAh USB battery (2 × 5V/3A)
Software pipeline
- Capture training data on the JetCar driving printed streets
- Label with Image Segmenter, augment, and train a segmentation network in Colab
- Deploy the trained model back to the Jetson Nano for live inference
- Run the closed-loop controller (camera → segmentation → steering)
Build overview
- Estimated cost: ~$510 (USD, BOM total)
- Skill level: Advanced (requires Linux, Python, ML training experience)
- Time: Several weekends — print, assemble, wire, train, tune
Attribution
- Creator: Stefan (@StefansAI)
- Source: https://github.com/StefansAI/JetCar
- License: Not declared in repo. Contact the author before commercial use or redistribution.
- Inspired by: NVIDIA JetBot and JetRacer
Why this is on orobot.io
This Program is a discovery and learning entry point — a curated overview, parts list, and stub control interface. The full firmware, ML training notebooks, and StreetMaker tooling live in the source repo. Build the car, train your model, then come back here to wire up custom commands.
🖨 Print Files (16)
Camera_Mount_Top.stl
ChargerLid.stl
Flatbed-JetsonNano.stl
Front_Axle.stl
HubCap.stl
LowerBody-LED-Cutout.stl
Required Hardware
JetCar Bill of Materials
From upstream: StefansAI/JetCar docs/BOM.md. Prices are author-provided; verify before buying.
Compute & Networking
| Item | Qty | Unit Cost | Notes |
|---|---|---|---|
| NVIDIA Jetson Nano Developer Kit | 1 | $149.00 | Required — GPU used for ML inference. Buy from NVIDIA or Arrow. |
| Cooling Fan | 1 | $8.32 | For Jetson Nano. |
| WiFi Card | 1 | $22.00 | M.2 module. |
| Wi-Fi Antennas | 2 | $1.84 | Molex via Arrow. |
| Micro SD Card | 1 | $10.88 | 64GB SanDisk Extreme. |
Power
| Item | Qty | Unit Cost | Notes |
|---|---|---|---|
| USB → 2.1mm Barrel Cable | 1 | $7.00 | Powers the Jetson Nano from the battery. |
| Right-angle USB Cable | 1 | $8.99 | For the second USB port. |