



Faze4 Robotic Arm
 B
BAbout this program
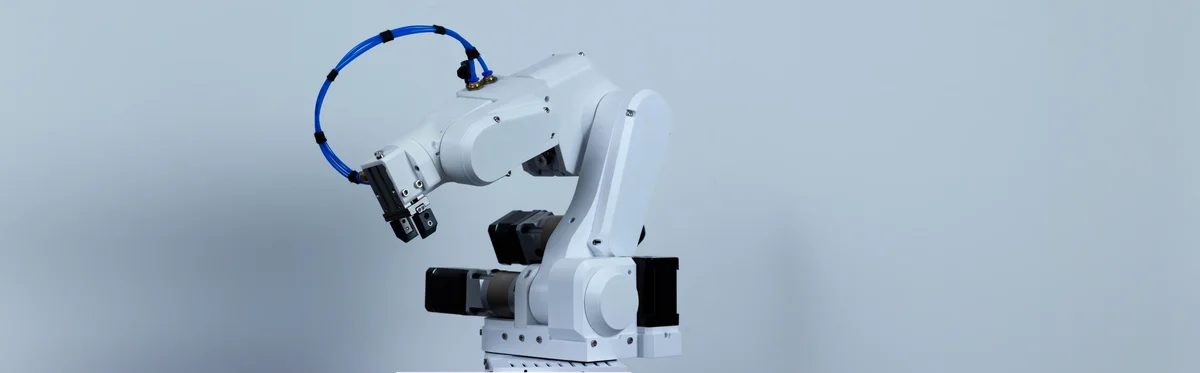
Faze4 — 6-Axis Cycloidal Robot Arm
Faze4 is a full-size 6-DOF desktop industrial-style robot arm, designed by Petar Crnjak and released by Source Robotics. It uses cycloidal reducers on all major joints (instead of the usual harmonic drives or belts), which gives it high payload capacity, near-zero backlash, and a noticeably beefier feel than a typical hobby arm.
What it is
- 6 rotational joints (classic industrial arm kinematics)
- Cycloidal reducers on joints 1–4
- NEMA 23 and NEMA 17 steppers with closed-loop encoder feedback
- Custom distribution PCB that fans out from a single controller to all joint drivers
- ~1000 parts total, roughly 15 kg assembled
- Work envelope ~650 mm reach
What it does
Faze4 lives in the "aspirational build" slot on this catalog. It's not a weekend project — it's a multi-week build with real machining decisions, bearings to press, and PCBs to populate. What you get at the end is a genuinely industrial-feeling arm that can move real weight and repeat positions accurately enough to pick and place non-trivial payloads.
Typical uses the community has shown:
- Pick-and-place with suction or a custom end-effector
- Light pen plotting and laser marking
- Educational kinematics demos (forward/inverse, Jacobians, singularities all matter here in a way they don't on a 5g gripper toy)
- ROS/MoveIt integration experiments
Cost and effort
Roughly $1000 in parts (steppers, bearings, PCBs, fasteners, some aluminum) plus ~3 kg of filament for the printed structure. Expect 40–80 hours of build time end-to-end.
Printed parts
Seven canonical mesh groups make up the structural skeleton:
base_link— stationary base housingrotary_base— joint 1 rotating platformnadlaktica— upper arm (joint 2 link)lakat— elbow (joint 3)podlaktica— forearm (joint 4)saka— wrist (joints 5/6)hvataljka— gripper body
Each of these is itself a multi-part assembly in the full BOM (halves, endcaps, motor mounts) — the STLs attached here are the canonical collision/visualization meshes straight from the URDF. See the upstream repo for the full printable set.
Software
Firmware ships in the upstream Faze4_test_code_1.0 tree (teensy/Arduino-style C++). The community has working ports to ROS via a separate package. The control surface exposed by this orobot program assumes a Raspberry Pi front-end talking to the arm's low-level controller over serial — see Documentation for the bridge contract.
Attribution & license
- Designer: Petar Crnjak / Source Robotics
- Upstream: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm (sibling project — see Faze4 repo for this specific arm)
- Hardware license: CERN OHL S (Strongly Reciprocal)
- Build docs: https://source-robotics.readthedocs.io/
- Community: Source Robotics Discord + Hackaday build log
Links
- Upstream repo: https://github.com/PCrnjak/Faze4-Robotic-arm
- Read the Docs: https://source-robotics.readthedocs.io/
- Hackaday writeup: https://hackaday.com/tag/faze4/
🖨 Print Files (26)
base_link.STL
rotary_base.STL
nadlaktica.STL
lakat.STL
podlaktica.STL
saka.STL
Required Hardware
| Part | Notes |
|---|---|
| Stepper motors | 6 joints; specific models in official BOM |
| Motor drivers | One per stepper |
| 3D printed arm links | All structural parts printable in PLA/PETG |
| Bearings | Multiple sizes per joint; sizes in BOM |
| Lead screws + nuts | For linear joints |
| M3/M4/M5 hardware | Bolts, nuts, heat inserts throughout |
| Arduino Mega 2560 | Main control board |
| CNC shield + stepper drivers | Motion control |
| 24V power supply | Powers motors |